
We’re heading to NVIDIA GTC 2026.
For the last year, we’ve been obsessed with a bottleneck in Physical AI: robots still struggle with dexterous, contact-rich manipulation because the ground-truth data isn’t there.
At Haptikos, we start where dexterity already exists: the human hand. We model it, capture it, and turn it into reliable multimodal demonstrations – the kind of data that can actually support learning, evaluation, and deployment for robot hands.
This March from the 16th to 19th, we’ll be at NVIDIA GTC 2026 to show that pipeline live.
What Physical AI is still missing
Robots are getting smarter fast. But manipulation is different. It’s not just motion – it’s contact, micro-corrections, timing, and intent. The models are advancing, but the hardest part is still under-supplied:
- high-quality, repeatable, contact-rich data that can serve as ground truth.
Our focus is the reliable ground truth for dexterous manipulation
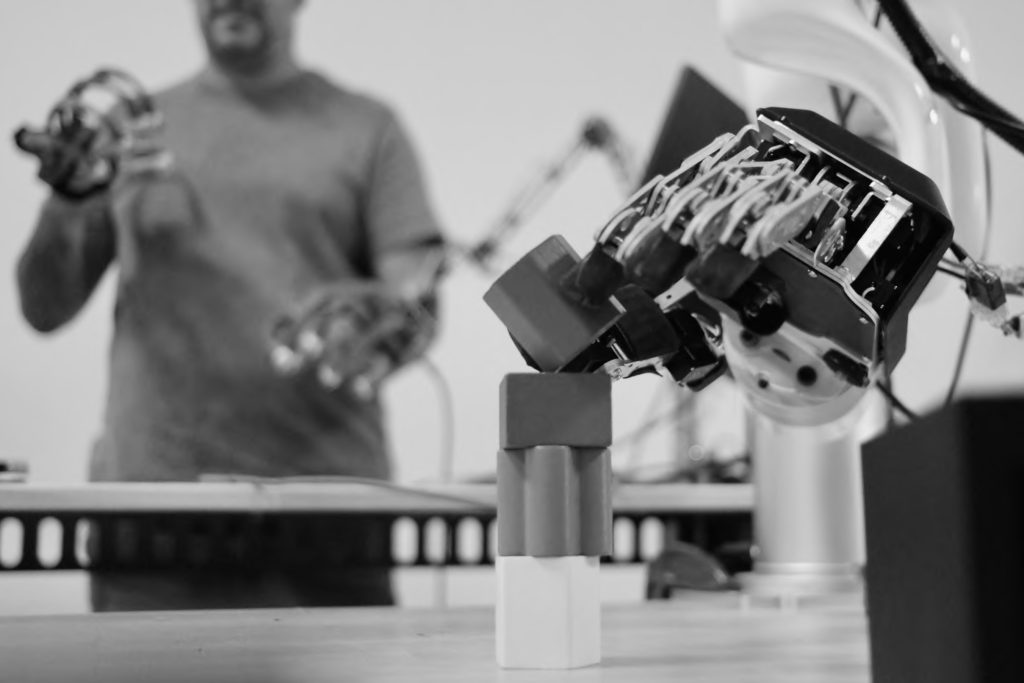
Haptikos hand exoskeletons capture high-precision hand motion and interaction cues that matter when objects resist, slip, collide, or deform. That data becomes a foundation for:
- Learning from Demonstration
- Teleoperation and shared autonomy
- Training and validation of dexterous policies
- Contact-rich manipulation benchmarking
As a consequence: better signals → better skills → more reliable execution.

Real → Sim → Real, at scale
At GTC we’ll be showcasing how we go from real demonstrations to scalable training-ready data:
- Capture demonstrations from human dexterity
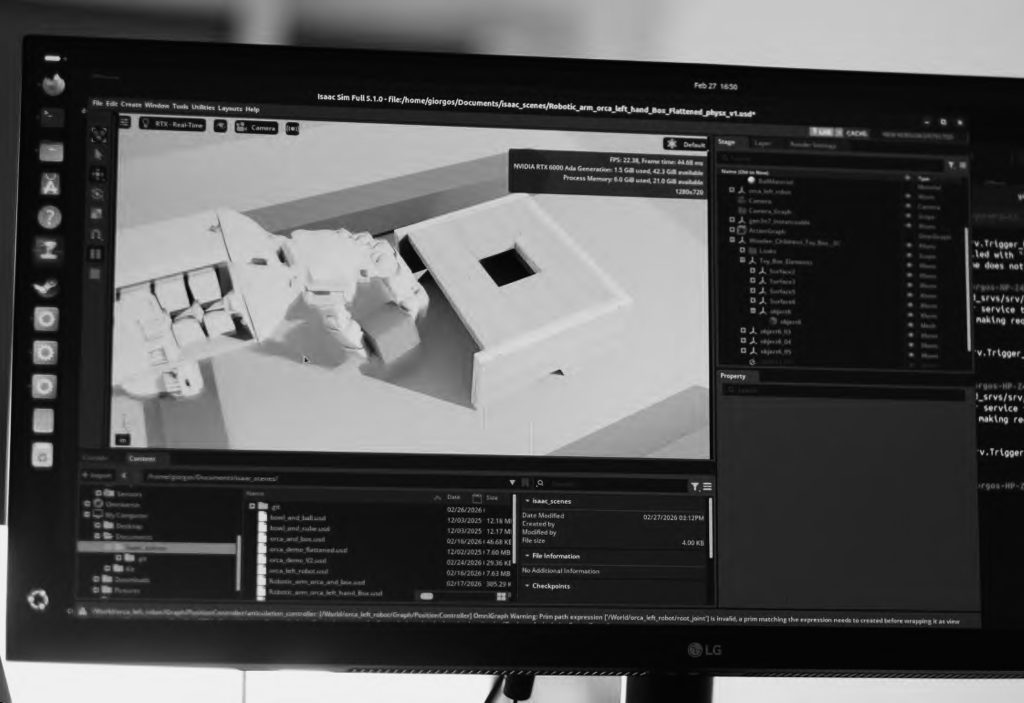
- Replay and stress-test them in simulation
- Expand coverage with synthetic variation
- Train policies that generalize and execute the same task reliably
This is how we think manipulation will scale—not by guessing, but by grounding learning in real interaction.
Meet us in person
Both Haptikos founders, Greg Agriopoulos and Vasilapostolos Ouranis, will be at GTC to demo the technology and connect with teams working on robot hands, humanoids, and Physical AI.
If you’re building dexterous manipulation, we’d love to meet and compare approaches.
Contact us at info@haptikos.tech