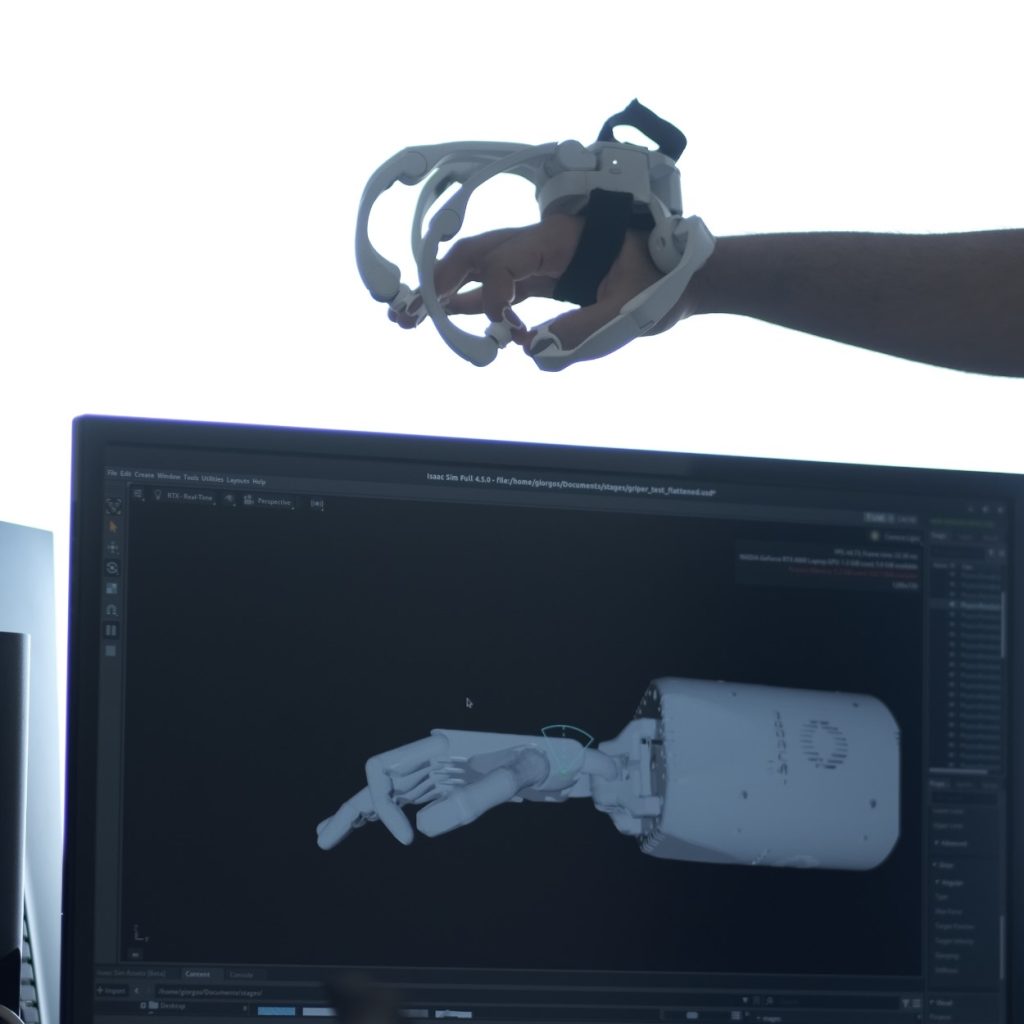
We’re proud to announce the integration of the Haptikos Robots API — part of the haptik_OS suite — with NVIDIA Isaac Sim, enabling real-time teleoperation of anthropomorphic robotic hands in simulation.
We began by showcasing one of the most sophisticated robotic end effectors available today — the Shadow Dexterous Hand — controlled directly through Haptikos exos in Isaac Sim. Every movement, from subtle finger motions to complex grasps, is mirrored instantly in the robot’s digital twin, thanks to our high-accuracy motion tracking and low-latency Haptikos API.
But this is just the starting point.
Our ultimate goal is to provide universal mappers for all available anthropomorphic robotic hands, enabling seamless control of any model, from any manufacturer, whether in simulation or in the real world.
By bridging human dexterity with advanced simulation, this integration unlocks new opportunities for:
- Remote teleoperation in challenging environments
- Dexterous manipulation training for robotics systems
- Simulation-based validation before physical deployment
This marks the beginning of a new chapter for Haptikos in robotics, as we work to make human–robot interaction more natural, intuitive, and effective across industries.